
日立建機が思い描く将来の施工現場
施工現場内の「人、機械、現場環境」の情報を共有し、安全性と生産性を向上
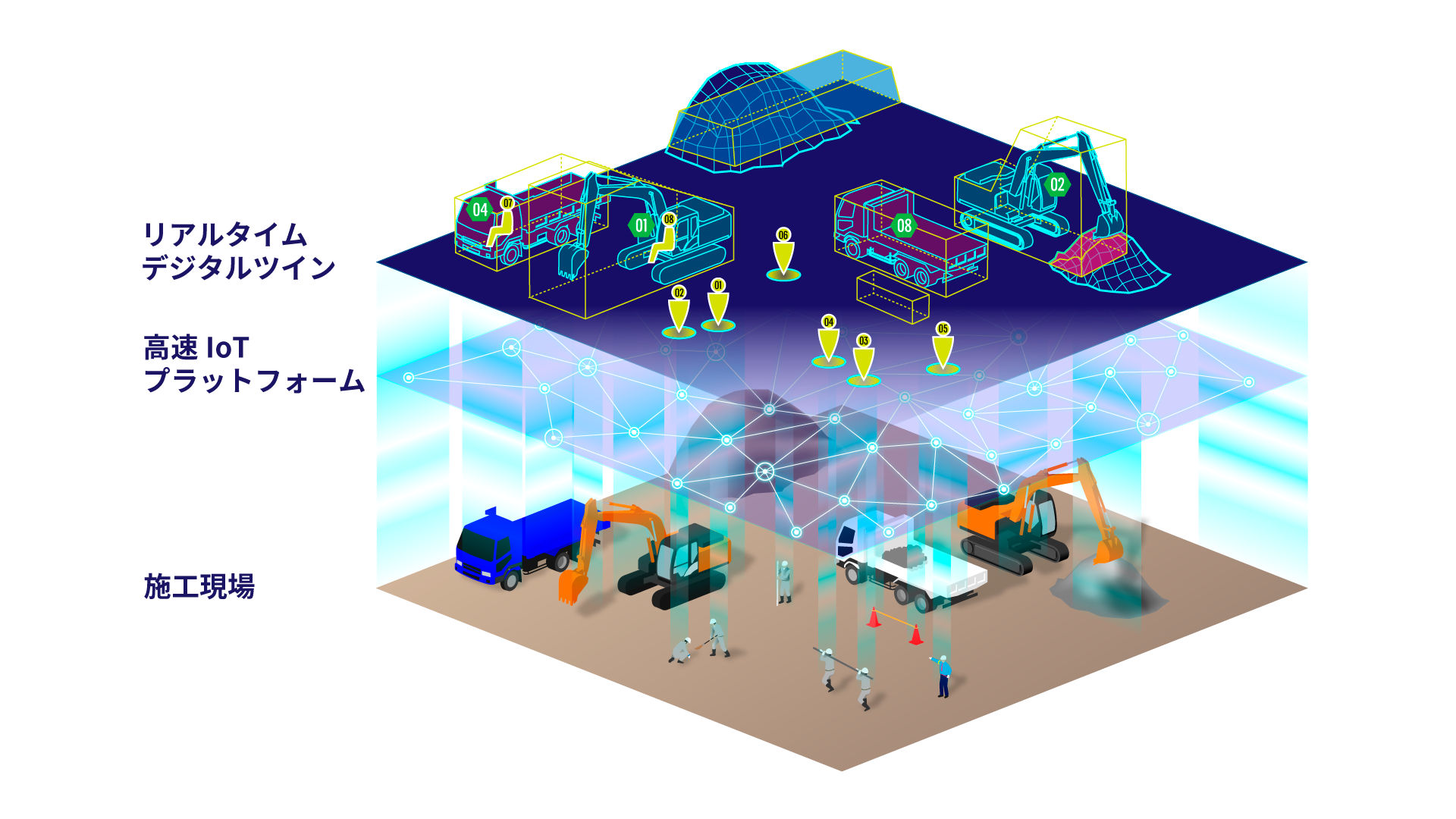
日立建機が思い描くのは、「人、機械、現場環境」の情報を相互にやり取りすることで、安全性と生産性の向上を自律的に図ることができる施工現場の姿です。

施工現場内情報連携
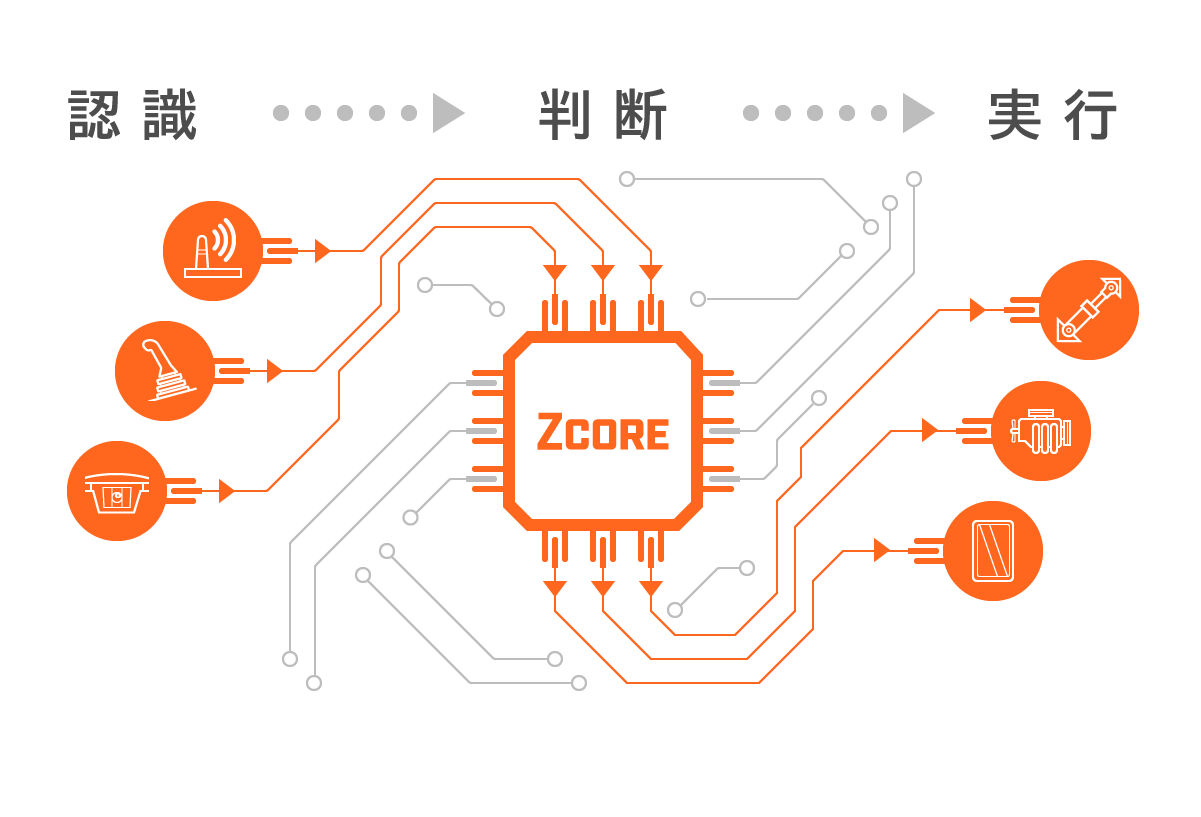
自律型建設機械向けシステムプラットフォーム「ZCORE®」
建設業においては、生産労働人口の減少や熟練技能者の高齢化を背景として、省人化による生産性の向上が課題となっています。その解決策のひとつとして、自律運転する建設機械や、遠隔操作による作業に期待が寄せられています。 これは、施工現場における機械へのニーズが、「人が思うように操縦する機械」から「人が思ったように作業してくれる機械」に変化していることを表しています。日立建機グループは、こうしたニーズの変化や現場の多種多様な要求への対応を目的として、現場でオペレータが作業時に行っている「認識・判断・実行」を、機械システムが行えるようにするためのシステムプラットフォーム「ZCORE®(ズィーコア)」を開発しました。
「協調安全」と「協調型建設機械」

ホイールローダ自動掘削・積込システムの開発
